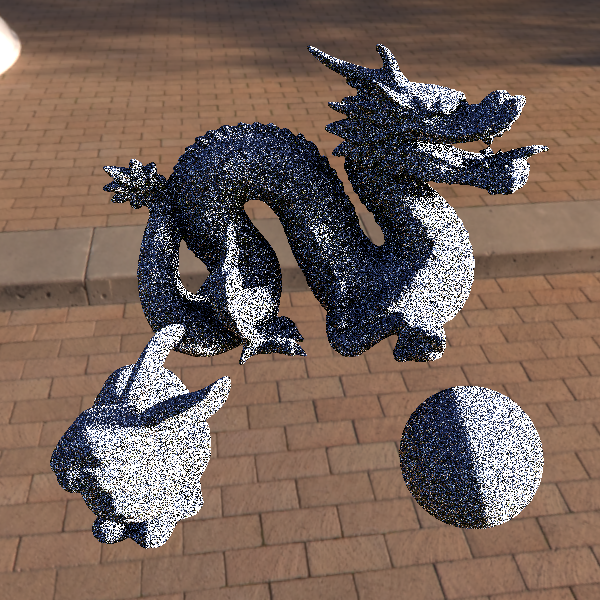
Multiple Importance Sampling Frame 0
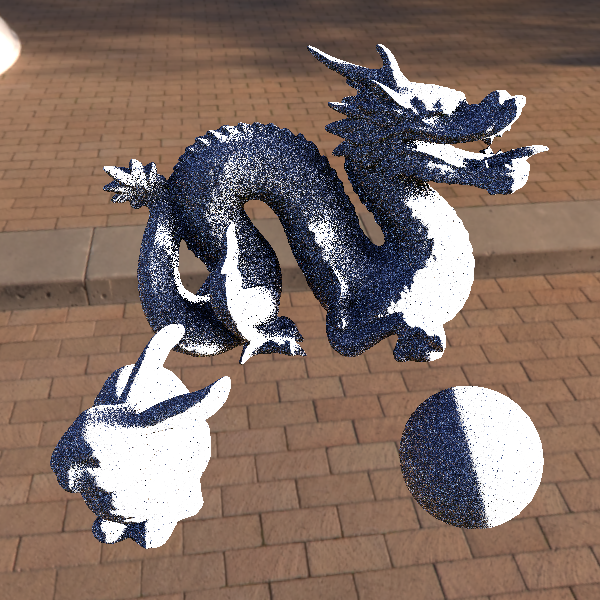
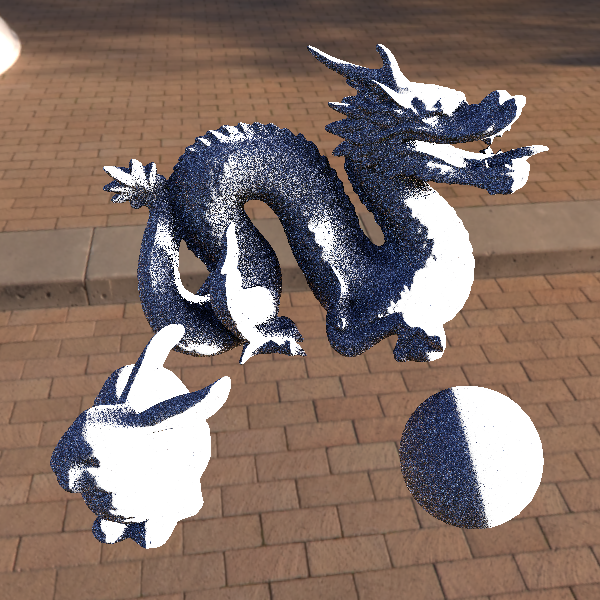
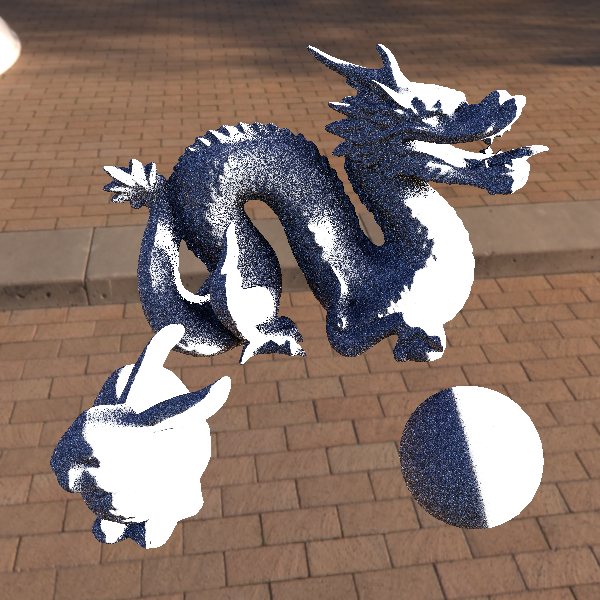
This sequence was taken every $4$ frames over $12$ frames in total, and as you can see its a clear improvement over using only BRDF sampling. The image is brighter and we've improved convergence in areas where the sun is visible.
I wont go into the way I calculated the PDF for the environment map but if you're interested the method is described [here](https://www.pbr-book.org/3ed-2018/Monte_Carlo_Integration/2D_Sampling_with_Multidimensional_Transformations#Piecewise-Constant2DDistributions) in "Physically Based Rendering: From Theory To Implementation" by Matt Pharr et al.
## Mesh Area Lights
I also added mesh area lights to my engine. This was done by constructing a discrete CDF over triangle areas. Let $A_{\Delta_i}$ be the area of triangle $i$ and $A = \sum_{i} A_{\Delta_i}$ the total mesh area. I select a triangle $i$ with probability:
$$p(i) = \frac{A_{\Delta_i}}{A}$$
sampling uniformly within that triangle with PDF, $\frac{1}{A_{\Delta_i}}$, the overall PDF becomes:
$$
p(x) = \frac{A_{\Delta_i}}{A} \cdot \frac{1}{A_{\Delta_i}} = \frac{1}{A}
$$
To generate a sample, I pick a random number, $u$, in the range $[0,A)$, then perform a binary search on the CDF to find the corresponding triangle index. Once I have the triangle, I uniformly sample barycentrics to get a point on its surface and evaluate the lighting contribution from that point.
If the scene contains multiple lights I sample one by a uniform distribution in the range $[0,N_l$), where $N_l$ is the total light count. The final PDF is then:
$$
p(x) = \frac{1}{N_l \cdot A}
$$
This scheme allows my renderer to produce visually realistic soft shadows with smooth and physically plausible penumbrae: